Veja no video logo abaixo nosso protótipo funcionando com precisão e eficiência.
Integrantes
Matheus Henrique Ferreira da Silva RA: 202338074
Gabriel Cypriano Godoy de Souza RA: 202308479
Jhonatas Carlos Bernardo Aguiar RA: 202348967
Lucas Hideki Almeida Ibusuki RA: 202338165
Victor Matheus dos Santos RA: 202351951
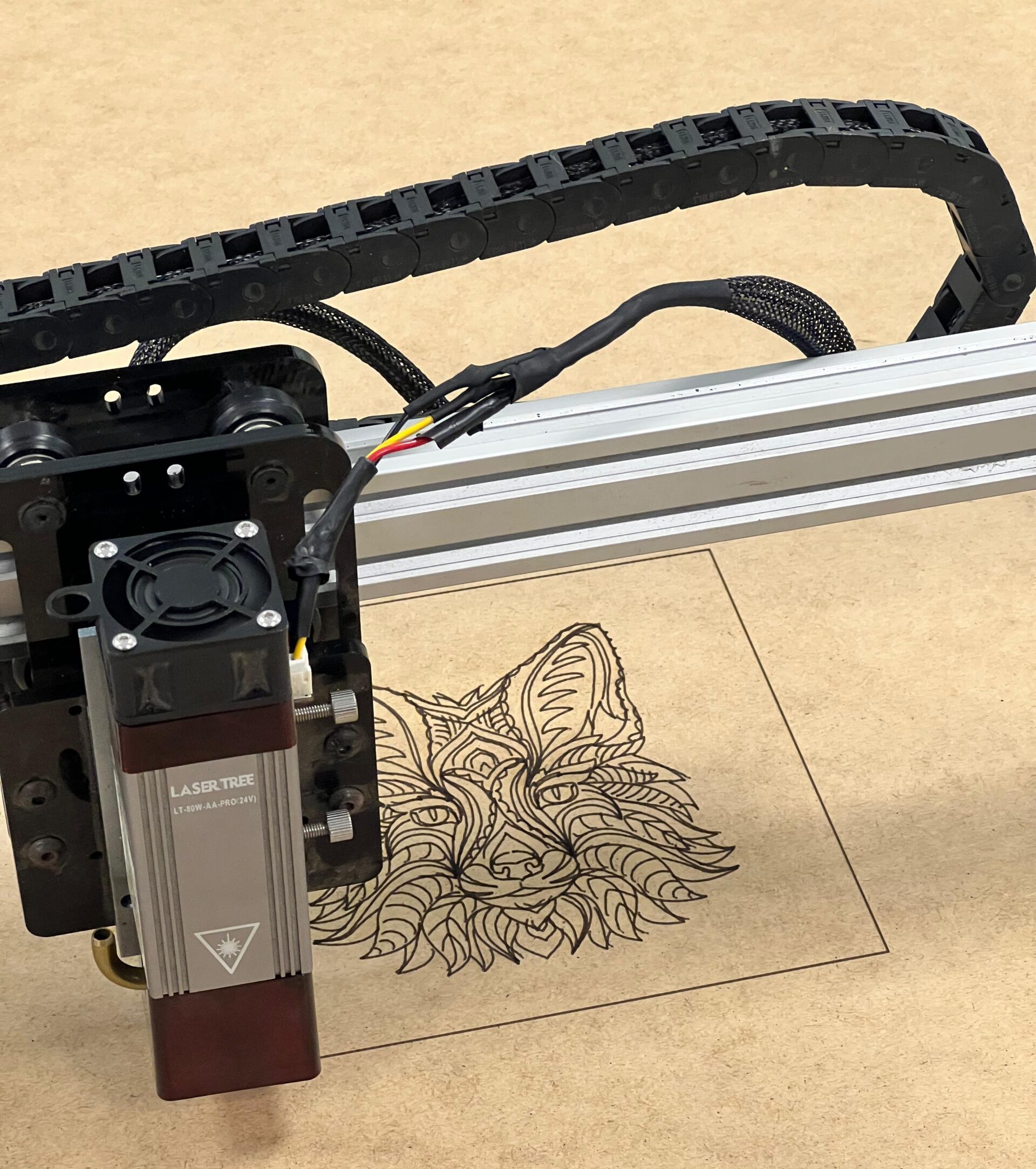
Protótipo
O protótipo consiste em um sistema de monitoramento remoto para máquinas CNC Laser baseado em conceitos da Indústria 4.0. Utilizando a controladora MKS DLC32, Node-RED e Adafruit IO, o sistema permite acompanhar em tempo real variáveis como posição, velocidade e potência do laser, aumentando a segurança, eficiência e confiabilidade operacional.